La ricerca condotta ha portato a risultati innovativi nel settore dei dispositivi diagnostici e chirurgici. I dispositivi ingeribili, comunemente utilizzati per esplorare e trattare aree anatomiche difficili da raggiungere all’interno del corpo umano, vengono assunti sotto forma di pillole. Queste capsule viaggiano attraverso il tratto digestivo, acquisendo immagini o rilasciando farmaci. Sebbene i dispositivi più semplici si spostino passivamente attraverso l’intestino, esistono molte situazioni in cui sarebbe vantaggioso che un dispositivo si attacchi ai tessuti o ad altre superfici flessibili.
La ricerca di soluzioni ispirate biologicamente per affrontare questa sfida ha una lunga storia, che va dall’utilizzo di adesivi ispirati al Velcro e alle lumache in campo medico. Tuttavia, la creazione di meccanismi di attacco reversibili e su richiesta, integrabili in dispositivi di dimensioni millimetriche per la diagnostica biomedica, rimane una sfida significativa.
Un nuovo approccio interdisciplinare, guidato da esperti come Robert Wood, Harry Lewis, Marlyn McGrath della Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) e James Weaver dell’Istituto Wyss di Harvard, ha tratto ispirazione da una fonte inaspettata: il mondo dei parassiti. Queste creature, nonostante la loro reputazione spesso inquietante, sono estremamente adattate ad ancorarsi a una vasta gamma di tessuti ospiti, utilizzando una varietà di organi di attacco specifici.
Imitare la morfologia e la funzionalità di queste complesse strutture biologiche rappresenta una sfida multidisciplinare che coinvolge competenze in settori come la robotica, la microfabbricazione, la progettazione di dispositivi medici e la zoologia degli invertebrati.
La ricerca, pubblicata su PNAS Nexus, si è concentrata sull’imitazione dei meccanismi di attacco dei vermi piatti intestinali. Utilizzando un metodo di fabbricazione a strati multi-materiali ispirato all’industria delle schede stampate, i ricercatori hanno creato un meccanismo con architettura radialmente simmetrica che consente movimenti biologicamente accurati.
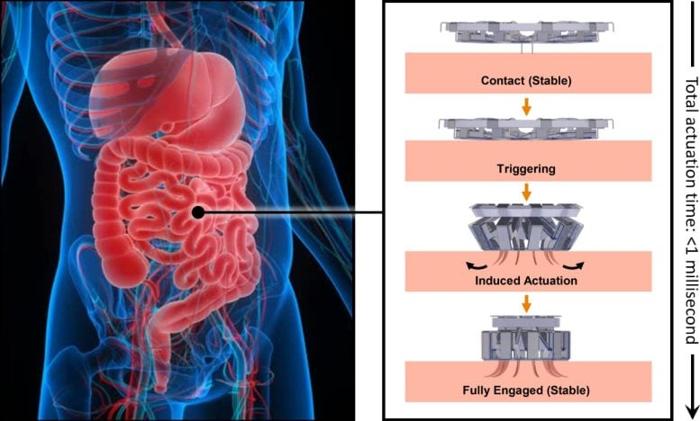
Il design finale del dispositivo include componenti rigidi in acciaio inossidabile collegati a cerniere in polimero. Una volta dispiegato, il dispositivo misura meno di 5 millimetri di diametro e pesa solo 44 microgrammi. Quando entra in contatto con un tessuto, attiva un meccanismo che fa ruotare i ganci di ancoraggio verso l’esterno, penetrando nel tessuto circostante con danni minimi.
Grazie alla sua molla elastomerica integrata, i ganci possono essere dispiegati in meno di 1 millisecondo. Inoltre, il metodo di fabbricazione utilizzato offre vantaggi in termini di rapidità ed efficienza nella produzione di dispositivi di piccole dimensioni.
Gli autori sottolineano che questo approccio potrebbe essere ulteriormente ottimizzato per ridurre le dimensioni dei dispositivi futuri. L’obiettivo è applicare le conoscenze acquisite per sviluppare dispositivi ancor più avanzati, adattabili a diversi contesti biomedici.

Oltre alle applicazioni mediche, i ricercatori immaginano l’utilizzo di questa tecnologia in ambiti non sanitari, come l’etichettatura reversibile per il monitoraggio della fauna selvatica e le piattaforme di rilevamento per materiali tessili.
Questo studio, finanziato dalla National Science Foundation, rappresenta un importante passo avanti nella progettazione di dispositivi bioispirati per applicazioni biomediche e oltre.






