
Gli scienziati hanno sviluppato un sistema di controllo bio-ispirato per emulare il nuoto del plesiosauro, risolvendo così il dibattuto problema dei quattro arti. Un team di ricerca potrebbe aver finalmente svelato il mistero su come il plesiosauro, antico rettile marino, si spostasse, creando un sistema di controllo bio-ispirato che imita i suoi adattamenti nel movimento.
Questi animali estinti presentano forme corporee molto diverse da quelle delle specie attuali, rendendo complicato determinare il loro modo di muoversi confrontandoli con gli animali viventi. Inoltre, i fossili raramente conservano i tessuti molli degli arti, fondamentali per studiare la locomozione e ottenere preziose informazioni sulle loro abitudini di vita.
I plesiosauri solcavano gli oceani preistorici della Terra, spinti dalla loro struttura corporea unica, caratterizzata da quattro grandi pinne di dimensioni equivalenti. Tuttavia, il modo in cui questi rettili utilizzassero le pinne per nuotare ha a lungo confuso i paleontologi, dando vita al dibattuto ‘problema dei quattro arti’.
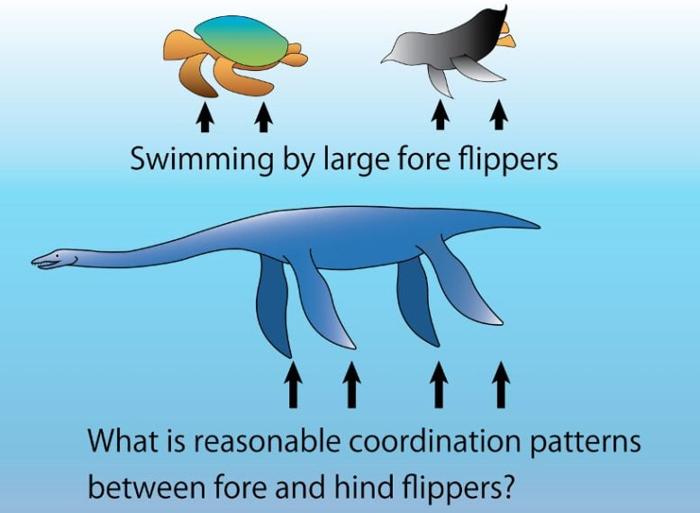
Recentemente, un gruppo di ricerca composto da scienziati dell’Università di Tohoku, dell’Università di Kanagawa e dell’Università di Manchester ha adottato un nuovo approccio per affrontare questo enigma. “Abbiamo deciso di esaminare non solo l’idrodinamica del nuoto, ma anche il controllo del movimento di questi animali”, afferma Akio Ishiguro, professore presso l’Istituto di Ricerca sulla Comunicazione Elettrica dell’Università di Tohoku.
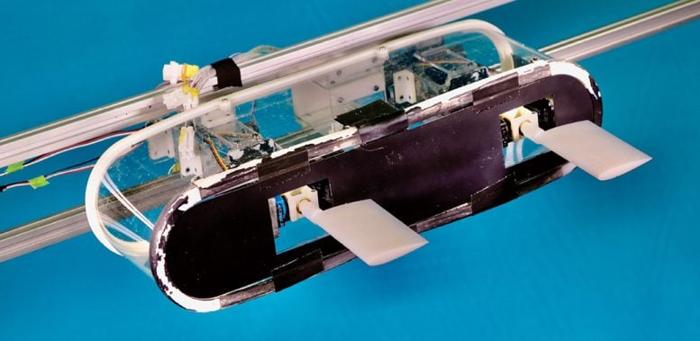
Akio e il suo team si sono ispirati alla meccanica della coordinazione tra arti che sottende i modelli di andatura flessibile di altri vertebrati quadrupedi, come cani e gatti. Hanno sviluppato un sistema di controllo autonomo decentralizzato per un robot simile a un plesiosauro, che ha dimostrato con successo la generazione di modelli coordinati tra le pinne anteriori e posteriori in risposta ai cambiamenti nel ciclo di battito e nella morfologia.
Secondo Akira Fukuhara, professore associato presso il RIEC e primo autore dello studio, “Il nostro nuovo approccio permette di ricostruire in modo flessibile i modelli di movimento degli animali estinti, adattandoli alle diverse situazioni. Questo ci consente di esplorare i repertori completi di locomozione di altre creature estinte e di approfondire le loro abitudini di vita.”
Le scoperte sono state recentemente pubblicate sulla rivista Scientific Reports e hanno coinvolto anche Mitsutoshi Sato e Hisayuki Ogawa, ex studenti laureati del RIEC, insieme a Tamaki Sato dell’Università di Kanagawa e William Sellers dell’Università di Manchester.
Guardando al futuro, il team di ricerca mira a creare ricostruzioni del movimento che considerino anche altri aspetti dei corpi dei plesiosauri. “Questi rettili avevano colli estremamente lunghi, ma le lunghezze variavano notevolmente da individuo a individuo”, aggiunge Ishiguro. “Ci proponiamo di sviluppare modelli che integrino il ruolo del collo, della testa e del torso nel controllo dei movimenti di queste antiche creature.”
Riferimento: “Ripensando al problema dei quattro arti nel nuoto del plesiosauro utilizzando un controllo decentralizzato bio-ispirato” di Akira Fukuhara, Mitsutoshi Sato, Hisayuki Ogawa, Tamaki Sato, William Sellers e Akio Ishiguro, 28 ottobre 2024, Scientific Reports. DOI: 10.1038/s41598-024-55805-z





